
目录
MotoPlusIDE安装
需要向安川购买,包含软件本体和加密狗。软件运行和编译程序需要加密狗才能进行。
注:不同控制器对应不同版本的MotoPlusIDE,不能混用。如yrc控制器对应MotoPlusIDE for YRC1000。
获得软件后双击运行【setup.exe】程序按提示安装即可。
编译设置
如果软件没有安装在默认目录,需要修改编译设置来让编译器找到依赖的头文件。
具体操作为:【Build】-【Build Settings】。勾选【Edit Enable/Disable】。将【Standard Include Directorie】下面的路径修改为对应安装路径下的【mpbuilder\inc】文件夹。修改完成后取消勾选【Edit Enable/Disable】即可。
如果对编译有特殊要求,可以修改后面的【Compile Code Command】和【Build Executable Command】。一般使用默认设置即可。
程序编译完成后可以在项目文件夹下面的【output】文件夹找到对应的out文件,拷进U盘里插到示教器上安装即可。
示教器设置
启用MotoPlus
在维护模式下,【系统】-【设置】-【MotoPlus FUNC.】。
管理MotoPlus应用程序(out文件)
在管理模式下,【MotoPlus APL.】。
应用程序加载情况可以在$B051变量读取,返回值分别对应如下:
- 0:成功加载;
- 1:应用程序数目大于一(一次只能加载一个);
- 2:内存不足(变量太多);
- 3:在SD卡中找不到应用程序文件夹;
- 4:应用程序太大;
用户定义文件
MotoPlus应用程序可以新建、编辑、删除用户定义文件。
启用
维护模式下,【文件】-【初始化】-【用户定义文件】。
调试
MotoPlus应用程序可通过telnet进行调试。可在程序中插入printf()或puts()来向电脑回传信息。
步骤
将电脑(网口)和控制柜(CN106口)通过网线连接,若有多个设备则需要集线器进行连接。
设置控制柜ip地址及端口:维护模式下,【系统】-【设置】-【选项】-【网络】-【详细】。LAN2网口(CN106)IP默认设为192.168.255.1。
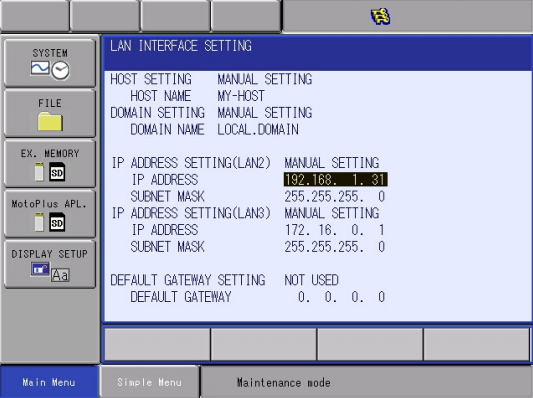
注:不能使用10.0.0.X。不能使用小于10500的端口。
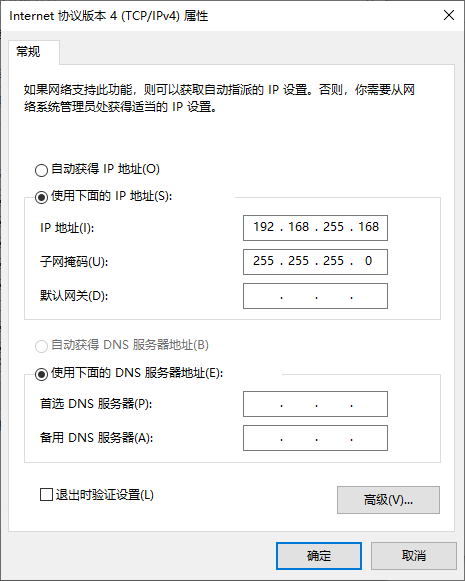
设置电脑ip地址及端口:【控制面板】-【网络连接】-【本地连接】-【一般】-【TCP/IP】-【属性】-【使用下列IP地址】。IP设置为192.168.255.X即可,子网掩码设为255.255.255.0。
启动调试软件:
方法1:在安装文件下面找到【控制器型号_TELNET】文件夹。双击运行编辑里面的ini文件,IP地址设为控制柜IP地址,其他默认。双击运行exe文件,会出现命令行窗口。假如连接成功,命令行窗口会显示”→“。
方法2:在MotoPlusIDE中,点击【Debug】-【Start Telnet Session】。
注:VxWorks用户名和密码默认均为MOTOMANrobot,无需更改。