
目录
灵感来源
三蓝一棕做的一期关于傅里叶级数的视频里面,展示了如何使用匀速旋转的矢量相加获得任意二维图形的方法。于是我想,这东西能不能用机械的方法实现出来呢?所以这个题目就变成了我课程设计的题目。

https://www.bilibili.com/video/BV1vt411N7Ti?share_source=copy_web
傅里叶级数相关理论
假设任意二维图像可以使用复函数 表示,则它等于下述傅里叶级数
表示,则它等于下述傅里叶级数

其中复系数
综上,具体做法如下:
- 使用复函数形式表示图形(读取svg图像、自己手写)
- 使用数值积分计算复系数
- 将所有项相加
参数计算的MATLAB实现
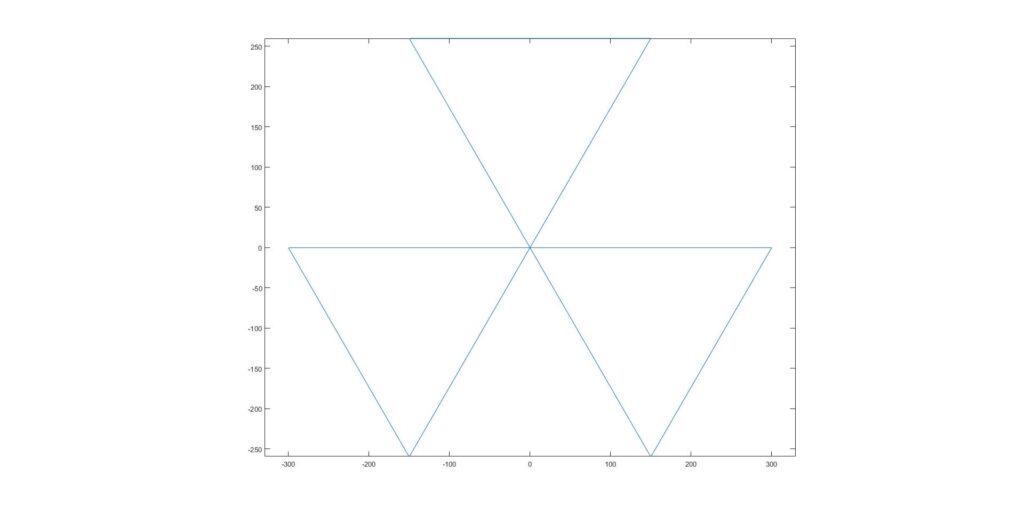
生成
keypoint = zeros(7,2);
keypoint(1,:) = [300 0];
keypoint(2,:) = [-300 1/6];
keypoint(3,:) = [-300*cos(pi/3)-300*sin(pi/3)*1i 2/6];
keypoint(4,:) = [300*cos(pi/3)+300*sin(pi/3)*1i 3/6];
keypoint(5,:) = [-300*cos(pi/3)+300*sin(pi/3)*1i 4/6];
keypoint(6,:) = [300*cos(pi/3)-300*sin(pi/3)*1i 5/6];
keypoint(7,:) = [300 1];
f = @(t) interp1(keypoint(:,2), keypoint(:,1), t);
t = 0:.001:1;
s = f(t);
s_real = real(s);
s_imag = imag(s);
plot(s_real, s_imag);
axis equal计算系数
c = complex(201, 1);
max_n = 100;
for n = -max_n:max_n
ef = @(t) exp(-2*pi*1i*n*t) .* f(t);
c(n+max_n+1) = integral(ef, 0, 1);
end
data = [];
m = 1;
for n = -max_n:max_n
if abs(c(n+max_n+1)) > 20
data(m, 1) = c(n+max_n+1);
data(m, 2) = n;
m = m + 1;
end
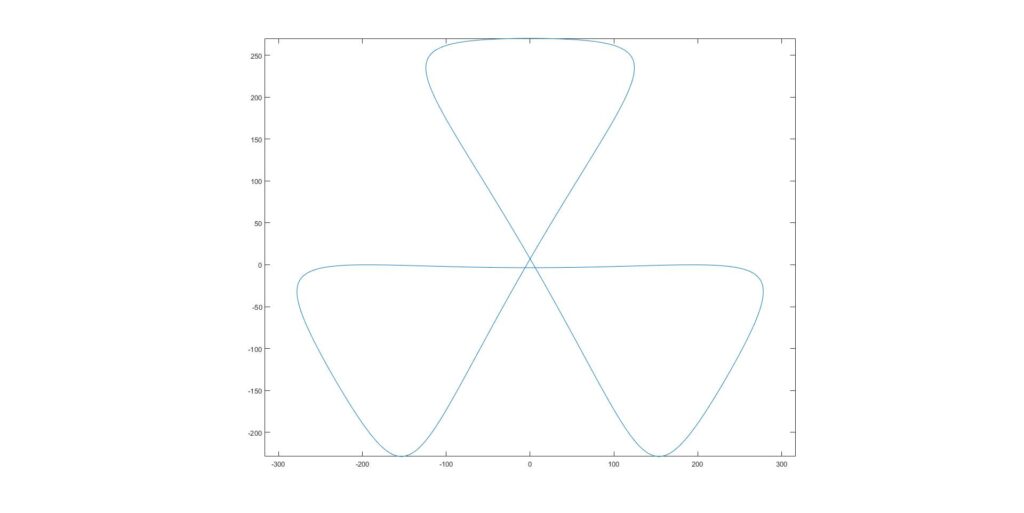
end绘图验证
figure;
t = 0:.001:1;
s = f_appr(t, data(:,1), data(:,2));
s_real = real(s);
s_imag = imag(s);
plot(s_real, s_imag);
axis equal其中f_appr()函数如下
function [ s ] = f_appr( t, c, n )
%f_appr 傅里叶级数
s = 0;
for m = 1:length(n)
s = s + c(m) .* exp(2*pi*1i*n(m)*t);
end
end
输出必要数据
output = [abs(data(:,1)) angle(data(:,1))*180/pi data(:,2)];计算结果如下
| 矢量长度 | 初始角度 | 转速 |
| 44.4217565757029 | 30.0000044776831 | -4 |
| 136.783594086297 | -60.0000075560673 | -1 |
| 177.687075394748 | 30.0000035072738 | 2 |
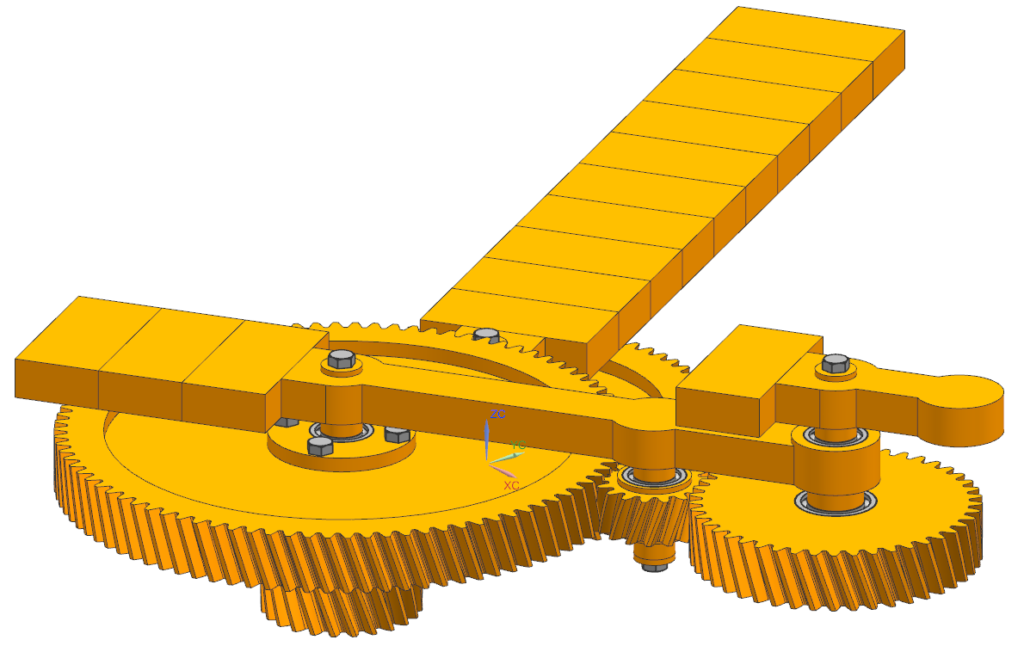
机构设计
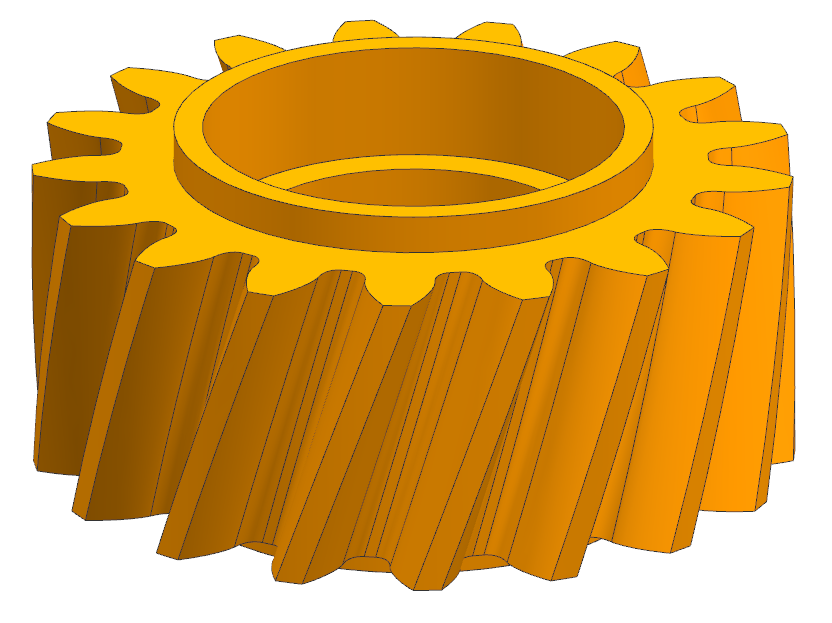
基础单元
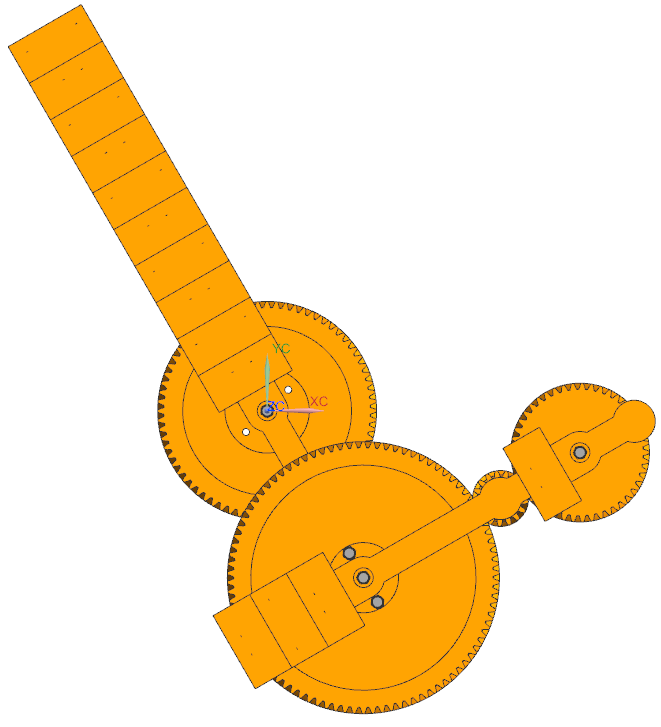
机构由周转轮系单元组成,如下图
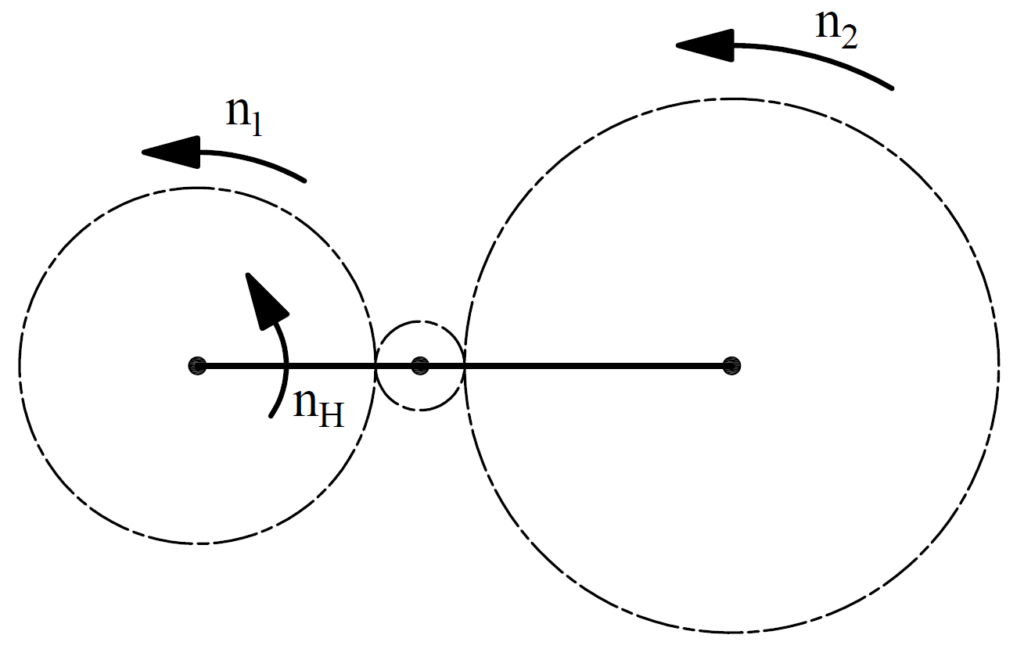
设左侧大齿轮的转速为n1、连杆转速为nH、右侧大齿轮转速为n2,则可以算出传动比如下

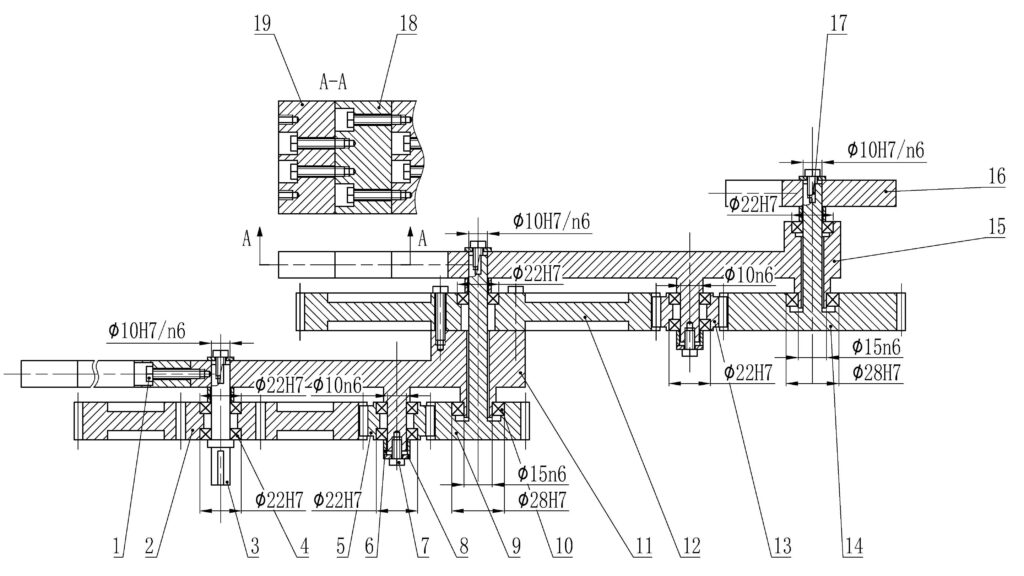
整体设计
机构整体原理图如下

已知

可以算出

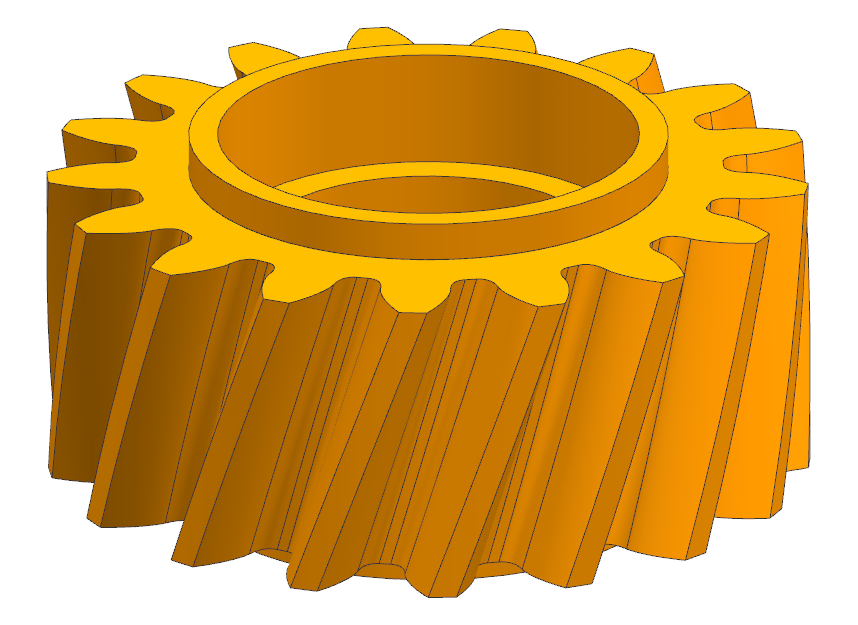
容易看出,在所有齿轮中,惰轮2、5相比起其他齿轮结构更简单,更便于更换,故这两个齿轮在不发生根切的前提下,应采用较小的齿数,以保证其他齿轮的寿命较长。
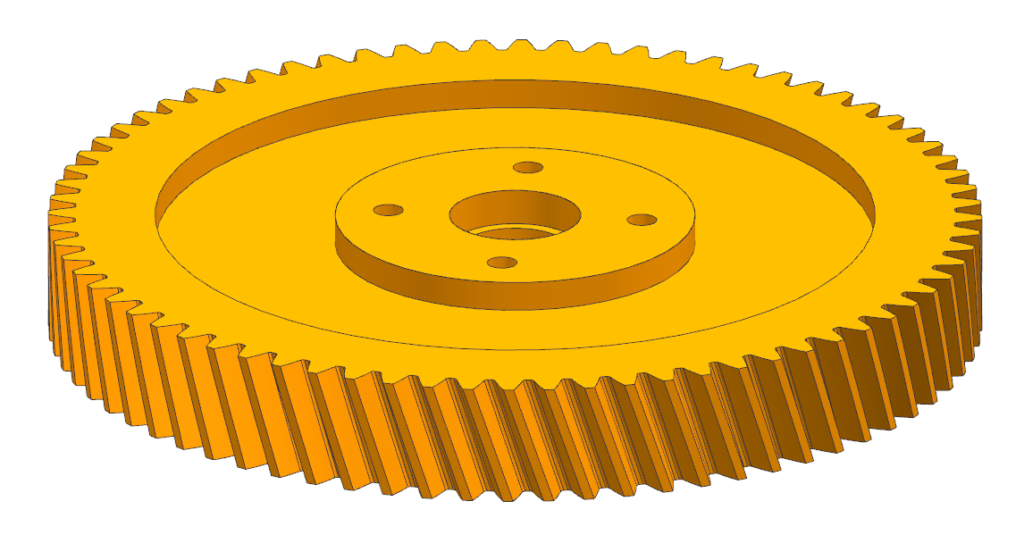
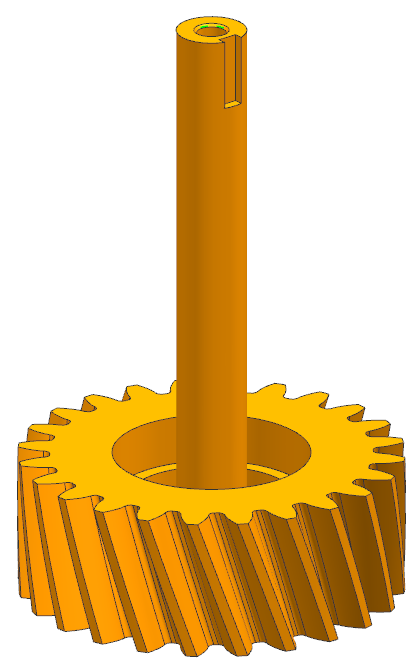
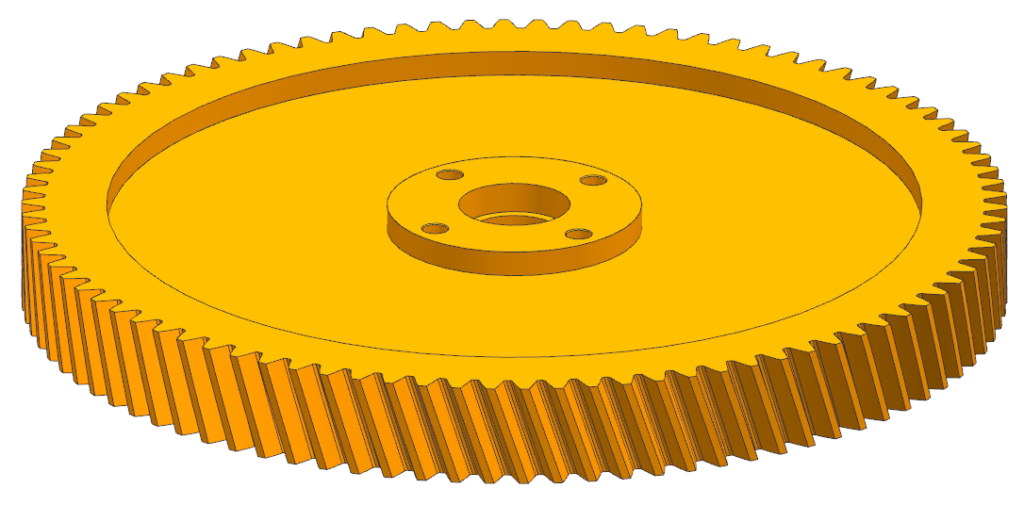
设齿轮1、2、3的模数为2,齿数分别为72、17、24,则齿轮1、2、3的螺旋角为

设齿轮4、5、6的模数为2,齿数分别为90、17、45,则齿轮4、5、6的螺旋角为

机构平衡
从原理图可以看出
- 机构静止时,机构自重会产生较大的倾覆力矩,这些力矩很大程度上由连杆的转轴承担
- 机构在运动时,由于每一级都会进行平面运动,并且每增加一级,角速度会成倍增加,故会产生严重的附加动载荷
解决这两个问题的方法为:增加配重块使机构的质量分布平衡
通过在每一级连杆相对于齿轮方向上添加配重块,使得该级轮系的重心位于该级输入轴的轴线上
如此一来,每级轮系的输入轴就只需要承担下述载荷
- 由机构自重产生沿轴向的正压力(主要)
- 驱动轮系加减速、克服机构运动阻力的扭矩(次要)
可见通过机构平衡设计,轴的受力状况明显改善,故可以采用较细的轴进行驱动
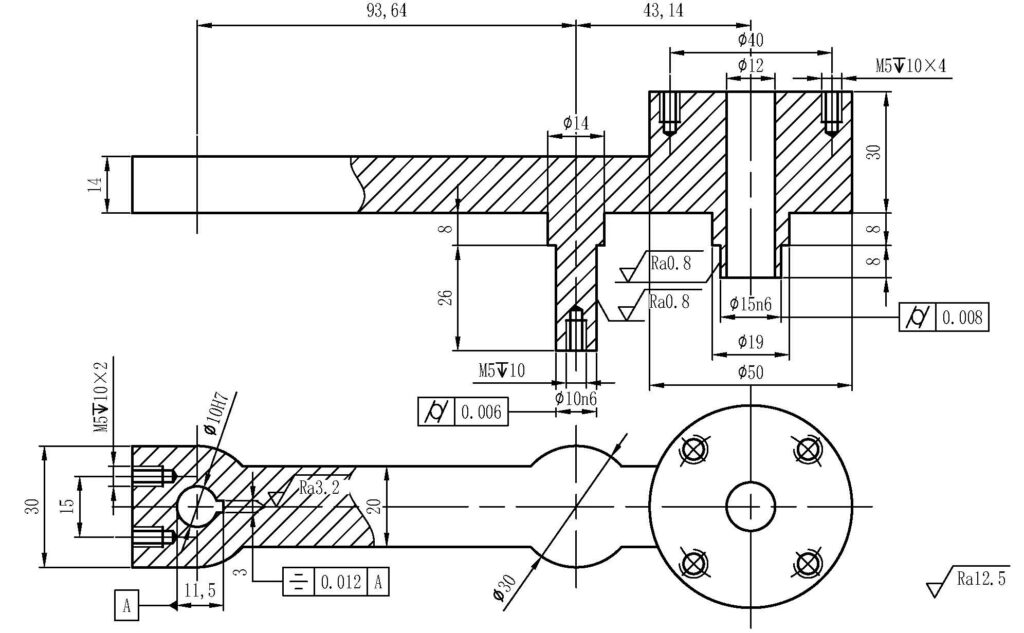
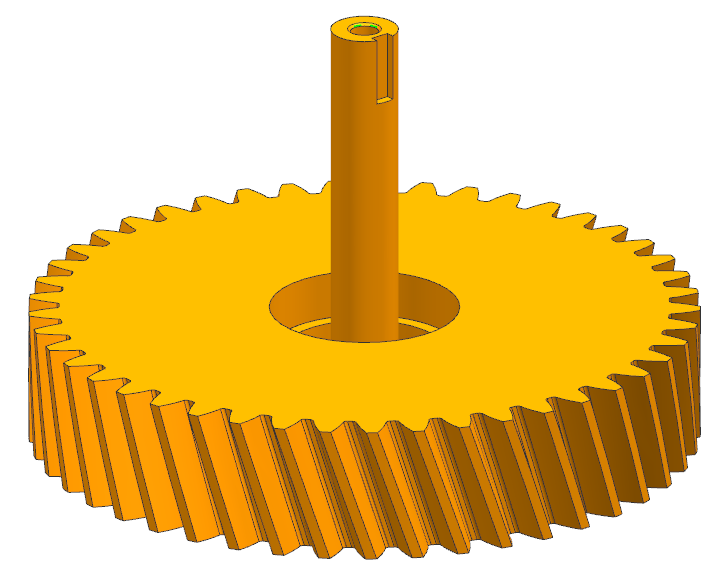
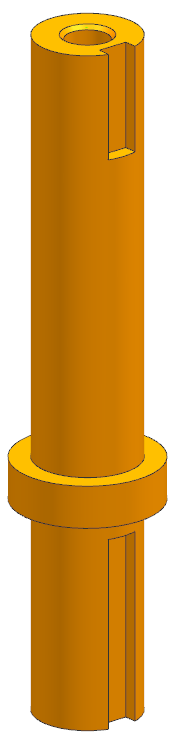
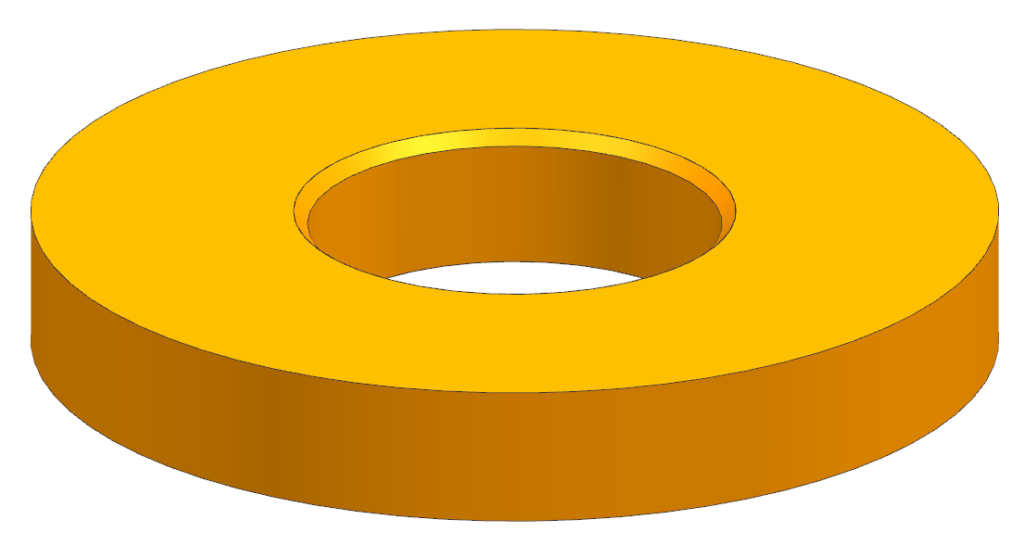
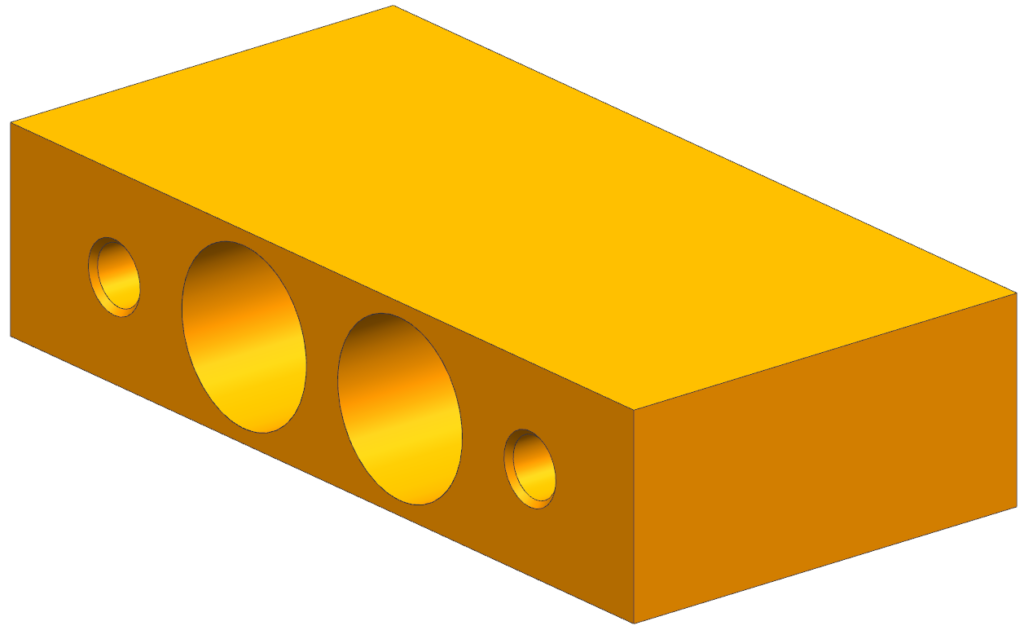
零件设计
图纸
三维模型
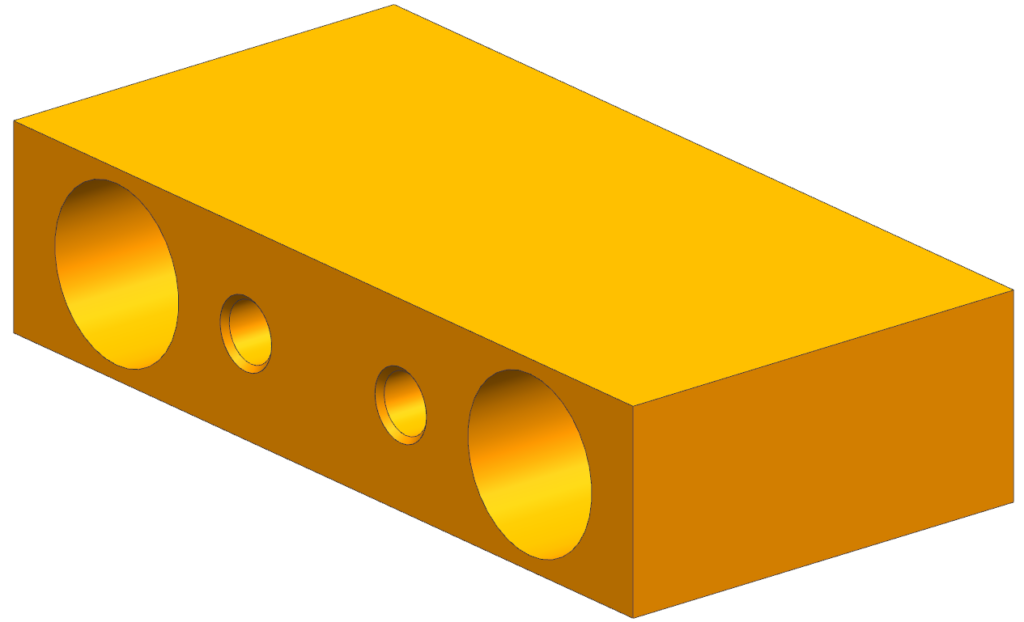
装配图
图纸
三维模型
运动仿真
总结
机构创新点
- 可绘制任意二维图形
- 图形精度可控
- 机构无冲击、无附加动载荷
- 零件复用程度高
目前尚存在的不足
- 机构平衡需要通过人工进行补偿
- 当选取级数增加时,机构尺寸成倍变小,造成设计困难
- 由于缺乏明确的应用场景,难以对机构各部件强度进行校核
- 目前配重块以串联形式叠加,当其数目较多时易发生弯曲变形
感想
通过三周的专业课程设计,我完整体验了从寻找创新思路、设计机构原理、设计各零件、整体装配到最后的运动仿真这一系列过程,将自己大学四年学到的机械工程知识综合运用到其中,我受益匪浅。
但是,在设计过程中,也碰到了不少的困难。首先是一开始选题的迷茫,机械设计体现在生活的方方面面,给我一种眼花缭乱的感觉,常常觉得自己想出来的设计思路早就有人实现过了。其次是在进行零件设计的时候,感觉机械设计课程上的知识很难应用到具体的设计中,主要体现在:课堂上学习的设计、校核方法仅适用于少数典型零件;并且各自为块,当机构整体零件数目增加时让人无从下手;减速箱的设计是这四年中唯一一次成体系进行设计的工程,很大程度上依赖于课程设计指导书的指引,难以泛化到一般的设计过程。
虽然困难重重,但是最终能够设计到目前的水平我觉得也已经很满足了。在进行原理设计的时候,将傅里叶级数应用到设计过程使我实实在在体验到创新的乐趣;另外,图纸、三维模型、运动仿真的制作也觉得得心应手,完成之后颇有成就感。在最后看见自己设计的机构按照预期工作之后,我就知道这三周的努力非常值得。
Very interesting and impressive work!