
目录
控制架构
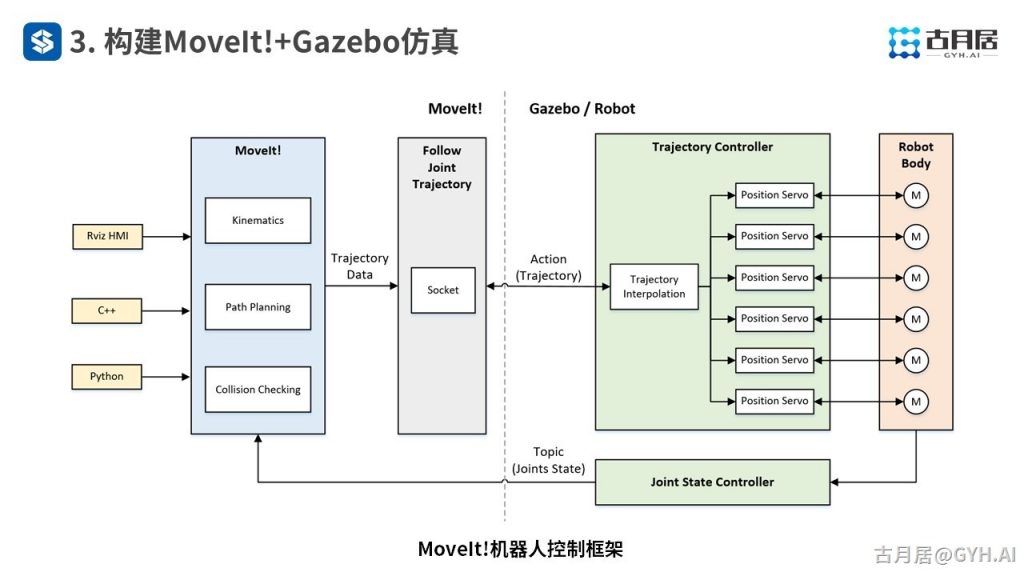
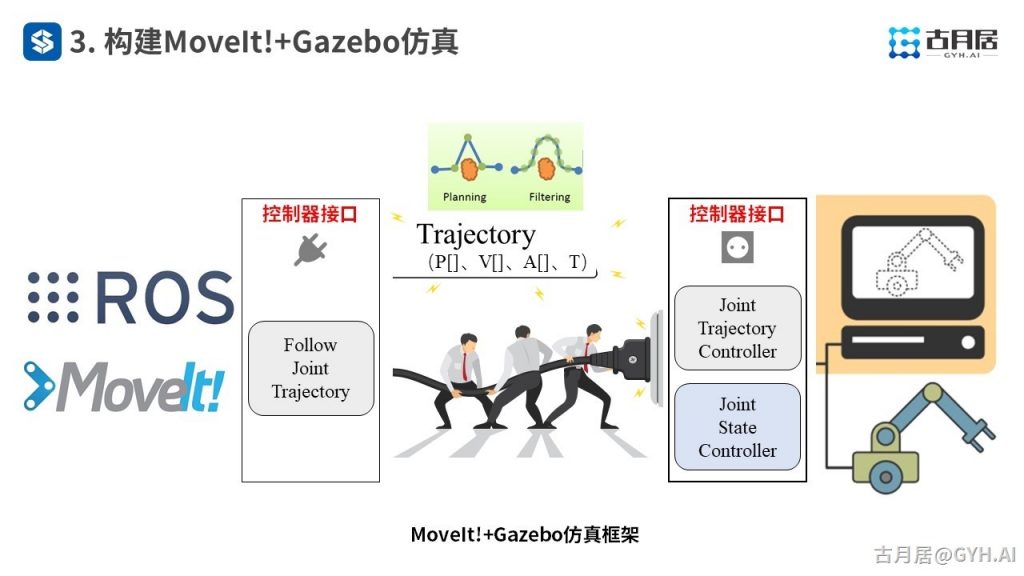
重点是完成控制接口两端的Follow Joint Trajectory、Joint Trajectory Controller、Joint State Controller配置。
Follow Joint Trajectory:作为action通信的client端,将Moveit!规划好的轨迹发给Gazebo。
Joint Trajectory Controller:这是action通信的server端,其中的关节名称必须要与机器人模型中的joint名称一致,并通过launch文件加载配置参数并启动控制器。
Joint State Controller:以50Hz的频率发布机器人的关节状态。
yaml文件配置
每一个冒号对应一级参数命名空间,如需添加多个机器人则要在前面再加一级(可以命名为机器人的名字),并在launch文件里面做相应改动(ns、remap)。注意理解参数命名空间的概念,具体详见yaml文件配置。三个控制器设置分别如下:
Follow Joint Trajectory:
controller_list:
- name: arm_joint_controller
action_ns: follow_joint_trajectory
default: True
type: FollowJointTrajectory
joints:
- joint_1_s
- joint_2_l
- joint_3_u
- joint_4_r
- joint_5_b
- joint_6_tJoint Trajectory Controller:
arm_joint_controller:
type: "position_controllers/JointTrajectoryController"
joints:
- joint_1_s
- joint_2_l
- joint_3_u
- joint_4_r
- joint_5_b
- joint_6_t
gains:
joint_1_s: {p: 1000.0, i: 0.0, d: 0.1, i_clamp: 0.0}
joint_2_l: {p: 1000.0, i: 0.0, d: 0.1, i_clamp: 0.0}
joint_3_u: {p: 1000.0, i: 0.0, d: 0.1, i_clamp: 0.0}
joint_4_r: {p: 1000.0, i: 0.0, d: 0.1, i_clamp: 0.0}
joint_5_b: {p: 1000.0, i: 0.0, d: 0.1, i_clamp: 0.0}
joint_6_t: {p: 1000.0, i: 0.0, d: 0.1, i_clamp: 0.0}Joint State Controller:
joint_state_controller:
type: joint_state_controller/JointStateController
publish_rate: 50其中,Joint State Controller和Follow Joint Trajectory已经使用MoveIt Setup Assistant自动生成,具体为config文件夹下的ros_controllers。我们只需要新建一个yaml文件填写剩下的Joint Trajectory Controller即可(该例中路径为$(find motoman_gazebo)/config/mh12_joint_trajectory_controller.yaml)。
launch文件配置
启动Moveit
参见下文
启动控制器
# 使用rosparam加载yaml文件里面定义的参数,注意修改包名及路径
<rosparam file="$(find motoman_mh12_moveit_config)/config/ros_controllers.yaml" command="load"/>
<rosparam file="$(find motoman_gazebo)/config/mh12_joint_trajectory_controller.yaml" command="load"/>
# 启动控制器,注意后两个的参数项为对应的控制器名称,与yaml文件对应
<node name="robot_state_publisher" type="robot_state_publisher" pkg="robot_state_publisher"/>
<node name="arm_controller_spawner" pkg="controller_manager" type="spawner" args="arm_joint_controller"/>
<node name="joint_controller_spawner" pkg="controller_manager" type="spawner" args="joint_state_controller"/>启动Gazebo
<include file = "$(find gazebo_ros)/launch/empty_world.launch">
<arg name="debug" value="$(arg debug)"/>
<arg name="use_sim_time" value="$(arg use_sim_time)"/>
<arg name="gui" value="$(arg gui)"/>
<arg name="paused" value="$(arg paused)"/>
<arg name="headless" value="$(arg headless)"/>
</include>
<node name="mh12_gazebo_spawner" pkg="gazebo_ros" type="spawn_model" respawn="false" output="screen"
args="-file $(arg urdf_path) -urdf -model mh12"/>直接照抄gazebo.launch里面对应内容即可。
可能碰到的问题
Could not find joint in 'hardware_interface::PositionJointInterface'.解决方法:修改urdf文件里面的<hardwareInterface>项为<hardwareInterface>hardware_interface/PositionJointInterface<hardwareInterface>
No p gain specified for pid. Namespace: /gazebo_ros_control/pid_gains/解决方法:无视即可,不影响使用。产生的原因为初始化RobotHWSim的时候robot_ros_control会加载对应参数。如果有的话就使用pid控制器,否则就使用gazebo的其他控制方法。