
目录
Setting up your robot using tf
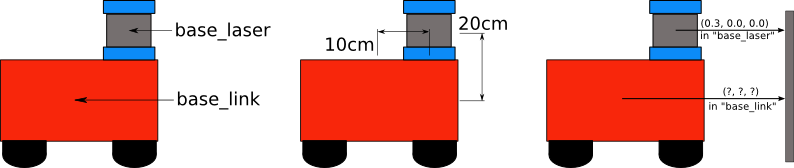
Transform Configuration

Writing Code
cd %TOP_DIR_YOUR_CATKIN_WS%/src
catkin_create_pkg robot_setup_tf roscpp tf geometry_msgsBroadcasting a Transform
Create src/tf_broadcaster.cpp
#include <ros/ros.h>
#include <tf/transform_broadcaster.h>
int main(int argc, char** argv){
ros::init(argc, argv, "robot_tf_publisher");
ros::NodeHandle n;
ros::Rate r(100);
tf::TransformBroadcaster broadcaster;
while(n.ok()){
broadcaster.sendTransform(
tf::StampedTransform(
tf::Transform(tf::Quaternion(0, 0, 0, 1), tf::Vector3(0.1, 0.0, 0.2)),
ros::Time::now(),"base_link", "base_laser"));
r.sleep();
}
}
Using a Transform
Create src/tf_listener.cpp
#include <ros/ros.h>
#include <geometry_msgs/PointStamped.h>
#include <tf/transform_listener.h>
void transformPoint(const tf::TransformListener& listener){
//we'll create a point in the base_laser frame that we'd like to transform to the base_link frame
geometry_msgs::PointStamped laser_point;
laser_point.header.frame_id = "base_laser";
//we'll just use the most recent transform available for our simple example
laser_point.header.stamp = ros::Time();
//just an arbitrary point in space
laser_point.point.x = 1.0;
laser_point.point.y = 0.2;
laser_point.point.z = 0.0;
try{
geometry_msgs::PointStamped base_point;
listener.transformPoint("base_link", laser_point, base_point);
ROS_INFO("base_laser: (%.2f, %.2f. %.2f) -----> base_link: (%.2f, %.2f, %.2f) at time %.2f",
laser_point.point.x, laser_point.point.y, laser_point.point.z,
base_point.point.x, base_point.point.y, base_point.point.z, base_point.header.stamp.toSec());
}
catch(tf::TransformException& ex){
ROS_ERROR("Received an exception trying to transform a point from \"base_laser\" to \"base_link\": %s", ex.what());
}
}
int main(int argc, char** argv){
ros::init(argc, argv, "robot_tf_listener");
ros::NodeHandle n;
tf::TransformListener listener(ros::Duration(10));
//we'll transform a point once every second
ros::Timer timer = n.createTimer(ros::Duration(1.0), boost::bind(&transformPoint, boost::ref(listener)));
ros::spin();
}
Building the Code
Append CMakeLists.txt
add_executable(tf_broadcaster src/tf_broadcaster.cpp)
add_executable(tf_listener src/tf_listener.cpp)
target_link_libraries(tf_broadcaster ${catkin_LIBRARIES})
target_link_libraries(tf_listener ${catkin_LIBRARIES})
cd %TOP_DIR_YOUR_CATKIN_WS% catkin_make
Running the Code
roscore
rosrun robot_setup_tf tf_broadcaster
rosrun robot_setup_tf tf_listenerPublishing Odometry Information over ROS
The nav_msgs/Odometry Message
# This represents an estimate of a position and velocity in free space.
# The pose in this message should be specified in the coordinate frame given by header.frame_id.
# The twist in this message should be specified in the coordinate frame given by the child_frame_id
Header header
string child_frame_id
geometry_msgs/PoseWithCovariance pose
geometry_msgs/TwistWithCovariance twistWriting the Code
Dependancy
catkin_creat_pkg odometry_publisher roscpp tf nav_msgs
Create src/odometry_publisher.cpp
#include <ros/ros.h>
#include <tf/transform_broadcaster.h>
#include <nav_msgs/Odometry.h>
int main(int argc, char** argv){
ros::init(argc, argv, "odometry_publisher");
ros::NodeHandle n;
ros::Publisher odom_pub = n.advertise<nav_msgs::Odometry>("odom", 50);
tf::TransformBroadcaster odom_broadcaster;
double x = 0.0;
double y = 0.0;
double th = 0.0;
double vx = 0.1;
double vy = -0.1;
double vth = 0.1;
ros::Time current_time, last_time;
current_time = ros::Time::now();
last_time = ros::Time::now();
ros::Rate r(1.0);
while(n.ok()){
ros::spinOnce(); // check for incoming messages
current_time = ros::Time::now();
//compute odometry in a typical way given the velocities of the robot
double dt = (current_time - last_time).toSec();
double delta_x = (vx * cos(th) - vy * sin(th)) * dt;
double delta_y = (vx * sin(th) + vy * cos(th)) * dt;
double delta_th = vth * dt;
x += delta_x;
y += delta_y;
th += delta_th;
//since all odometry is 6DOF we'll need a quaternion created from yaw
geometry_msgs::Quaternion odom_quat = tf::createQuaternionMsgFromYaw(th);
//first, we'll publish the transform over tf
geometry_msgs::TransformStamped odom_trans;
odom_trans.header.stamp = current_time;
odom_trans.header.frame_id = "odom";
odom_trans.child_frame_id = "base_link";
odom_trans.transform.translation.x = x;
odom_trans.transform.translation.y = y;
odom_trans.transform.translation.z = 0.0;
odom_trans.transform.rotation = odom_quat;
//send the transform
odom_broadcaster.sendTransform(odom_trans);
//next, we'll publish the odometry message over ROS
nav_msgs::Odometry odom;
odom.header.stamp = current_time;
odom.header.frame_id = "odom";
//set the position
odom.pose.pose.position.x = x;
odom.pose.pose.position.y = y;
odom.pose.pose.position.z = 0.0;
odom.pose.pose.orientation = odom_quat;
//set the velocity
odom.child_frame_id = "base_link";
odom.twist.twist.linear.x = vx;
odom.twist.twist.linear.y = vy;
odom.twist.twist.angular.z = vth;
//publish the message
odom_pub.publish(odom);
last_time = current_time;
r.sleep();
}
}Publishing Sensor Streams Over ROS
Dependancy
catkin_creat_pkg sensor_publishers roscpp sensor_msgsROS Message Headers
#Standard metadata for higher-level flow data types #sequence ID: consecutively increasing ID uint32 seq #Two-integer timestamp that is expressed as: # * stamp.secs: seconds (stamp_secs) since epoch # * stamp.nsecs: nanoseconds since stamp_secs # time-handling sugar is provided by the client library time stamp #Frame this data is associated with # 0: no frame # 1: global frame string frame_id
Publishing LaserScans over ROS
The LaserScan Message
# # Laser scans angles are measured counter clockwise, with 0 facing forward # (along the x-axis) of the device frame # Header header float32 angle_min # start angle of the scan [rad] float32 angle_max # end angle of the scan [rad] float32 angle_increment # angular distance between measurements [rad] float32 time_increment # time between measurements [seconds] float32 scan_time # time between scans [seconds] float32 range_min # minimum range value [m] float32 range_max # maximum range value [m] float32[] ranges # range data [m] (Note: values < range_min or > range_max should be discarded) float32[] intensities # intensity data [device-specific units]
Writing Code to Publish a LaserScan Message
Create src/laser_scan_publisher.cpp
#include <ros/ros.h>
#include <sensor_msgs/LaserScan.h>
int main(int argc, char** argv){
ros::init(argc, argv, "laser_scan_publisher");
ros::NodeHandle n;
ros::Publisher scan_pub = n.advertise<sensor_msgs::LaserScan>("scan", 50);
unsigned int num_readings = 100;
double laser_frequency = 40;
double ranges[num_readings];
double intensities[num_readings];
int count = 0;
ros::Rate r(1.0);
while(n.ok()){
//generate some fake data for our laser scan
for(unsigned int i = 0; i < num_readings; ++i){
ranges[i] = count;
intensities[i] = 100 + count;
}
ros::Time scan_time = ros::Time::now();
//populate the LaserScan message
sensor_msgs::LaserScan scan;
scan.header.stamp = scan_time;
scan.header.frame_id = "laser_frame";
scan.angle_min = -1.57;
scan.angle_max = 1.57;
scan.angle_increment = 3.14 / num_readings;
scan.time_increment = (1 / laser_frequency) / (num_readings);
scan.range_min = 0.0;
scan.range_max = 100.0;
scan.ranges.resize(num_readings);
scan.intensities.resize(num_readings);
for(unsigned int i = 0; i < num_readings; ++i){
scan.ranges[i] = ranges[i];
scan.intensities[i] = intensities[i];
}
scan_pub.publish(scan);
++count;
r.sleep();
}
}
Publishing PointClouds over ROS
The PointCloud Message
#This message holds a collection of 3d points, plus optional additional information about each point. #Each Point32 should be interpreted as a 3d point in the frame given in the header Header header geometry_msgs/Point32[] points #Array of 3d points ChannelFloat32[] channels #Each channel should have the same number of elements as points array, and the data in each channel should correspond 1:1 with each point
Writing Code to Publish a PointCloud Message
Create src/point_cloud_publisher.cpp
#include <ros/ros.h>
#include <sensor_msgs/PointCloud.h>
int main(int argc, char** argv){
ros::init(argc, argv, "point_cloud_publisher");
ros::NodeHandle n;
ros::Publisher cloud_pub = n.advertise<sensor_msgs::PointCloud>("cloud", 50);
unsigned int num_points = 100;
int count = 0;
ros::Rate r(1.0);
while(n.ok()){
sensor_msgs::PointCloud cloud;
cloud.header.stamp = ros::Time::now();
cloud.header.frame_id = "sensor_frame";
cloud.points.resize(num_points);
//we'll also add an intensity channel to the cloud
cloud.channels.resize(1);
cloud.channels[0].name = "intensities";
cloud.channels[0].values.resize(num_points);
//generate some fake data for our point cloud
for(unsigned int i = 0; i < num_points; ++i){
cloud.points[i].x = 1 + count;
cloud.points[i].y = 2 + count;
cloud.points[i].z = 3 + count;
cloud.channels[0].values[i] = 100 + count;
}
cloud_pub.publish(cloud);
++count;
r.sleep();
}
}